两自由度移动平台搭建-EXP-运动控制-XY平台
实验目的
摘要:
本项目展示了一个XY两自由度移动平台,X轴和Y轴均由直线电机驱动,配备磁栅尺实现精确位移测量,限位开关确保运动安全,每个轴上还安装加速度计采集动态信息。系统通过上位机Simulink控制,结合DAQ设备实现闭环控制与数据采集,便于进行运动控制实验、算法验证和动力学分析,为自动化实验教学和科研提供可视化和可复现的控制平台。
- 关键词:Parker R10-3A,AMC B060A400AC;三相无刷电机;运动控制;Simulink 仿真控制,Omron EE-SPY415,ADXL210E,加速计,LIDA 477 磁栅尺
注:本文仅从实验系统与工程实现角度进行记录。
实验系统整体结构
下图为根据实验内容整理的系统结构框图。
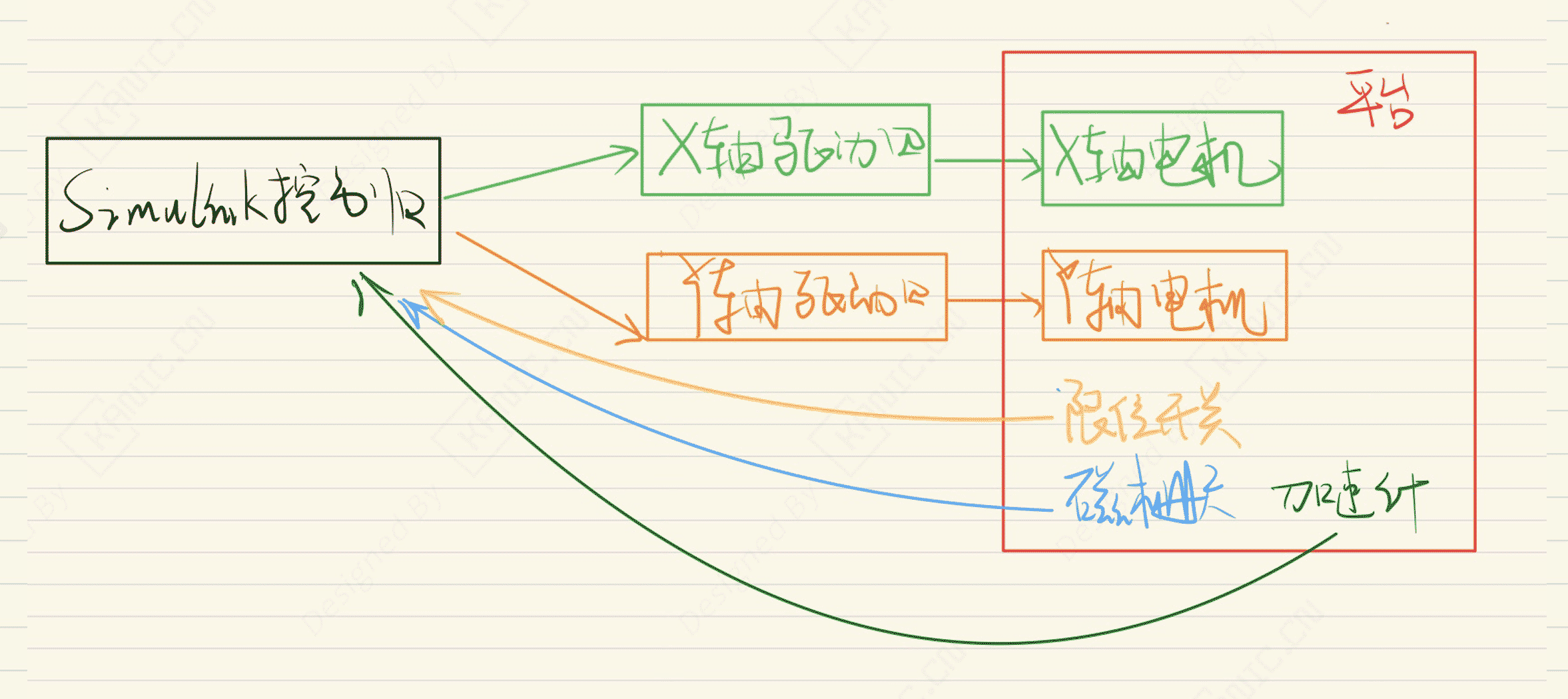
关键信号与实验流程说明(精炼版)
- Simulink控制器 生成运动控制指令到 驱动器
- 驱动 X 轴和 Y 轴的直线电机执行运动
- 磁栅尺测量 X/Y 轴位移
- 加速度计测量 X/Y 轴加速度
- 限位开关监测 X/Y 轴极限位置
- 所有传感器数据和限位状态反馈回 Simulink控制器
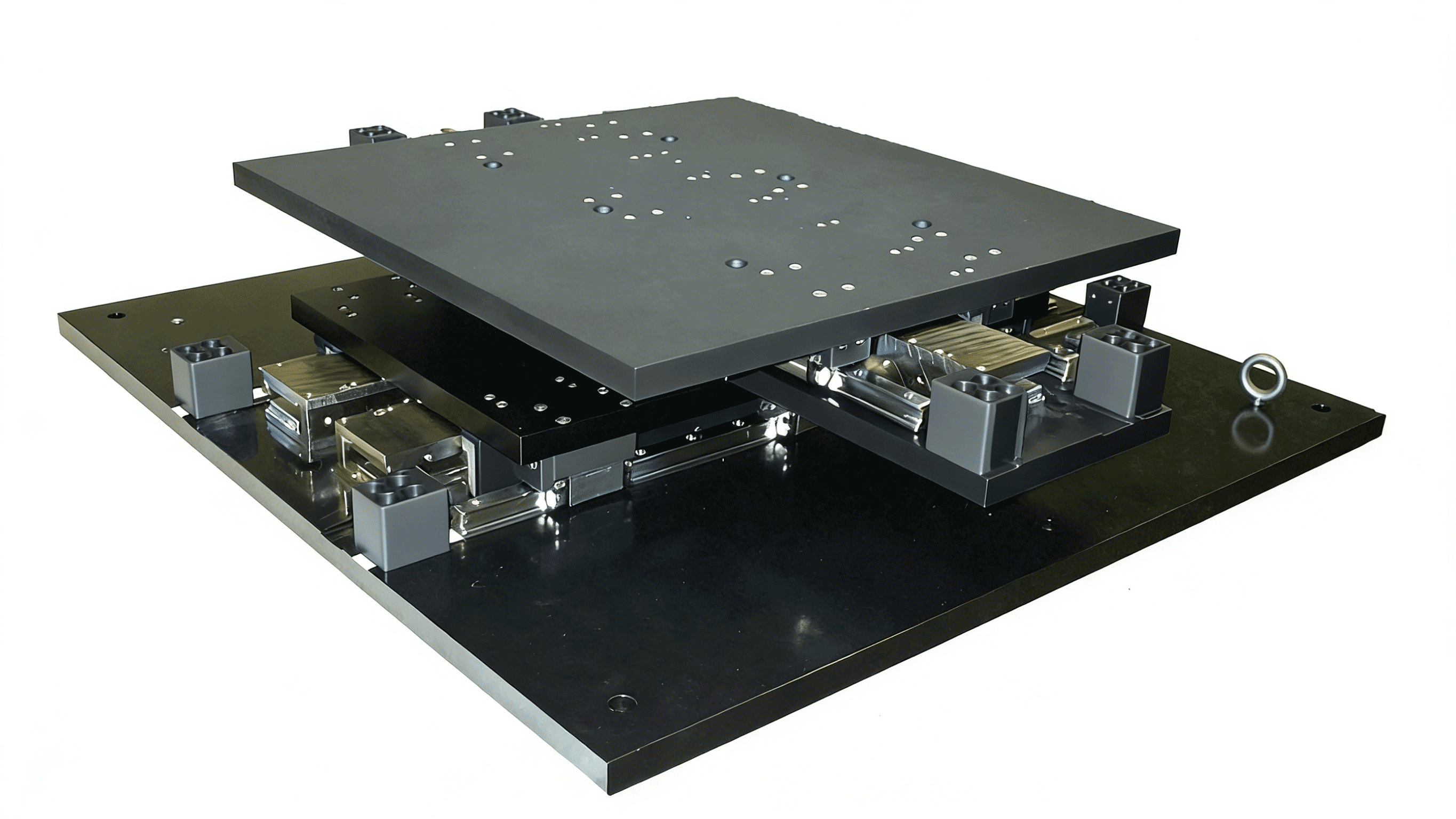
实验数据与现场
说明
结构框图来源于实际实验平台验证后的通用实现形式,细节根据具体硬件版本略有差异。
涉及的部分硬件
- Parker R10-3A 三相无刷直线电机
- ADXL210E 双轴加速度模块
- Omron EE-SPY415 行程限位开关
- LIDA 477 磁栅尺
- AMC B30A40AC B060A400AC 电机驱动器
以上配置仅用于说明实验背景,不同应用场景下可采用等效方案。
交流说明
>本文相关代码与实验案例已整理至 GitHub(KANIC-lab/KANIC),主要用于自动化控制实验、半实物仿真及控制算法验证。
★ 适用场景:
- 自动化控制课程实验搭建
- 研究生论文实验验证
- 控制系统与硬件联调测试
◆ 如需获取以下内容:
- 实验系统配置方案与Simulink配套模板
- 设备租赁与替代方案
- 控制实验快速搭建路径
如果你也在做类似实验,相关设备可以租用,我可以帮你调通——直接私信我
📌 更多同类实验案例,涵盖运动控制、振动控制、液压气动等20个方向 👉 点击查看完整案例目录