编码器正反方向这点事,早点想清楚-PART-编码器-方向
关键字:编码器, SIKO MSK200, 半实物仿真, PID 控制, 方向
在实验和半实物仿真中,编码器方向反了是个很常见的情况。
机构在往一个方向动,反馈却在往反方向数,问题本身不复杂,但处理方式很容易走偏。
为什么会出现正反方向?
增量式编码器本质上靠 A、B 两相信号的相位先后来判断方向。
无论是:
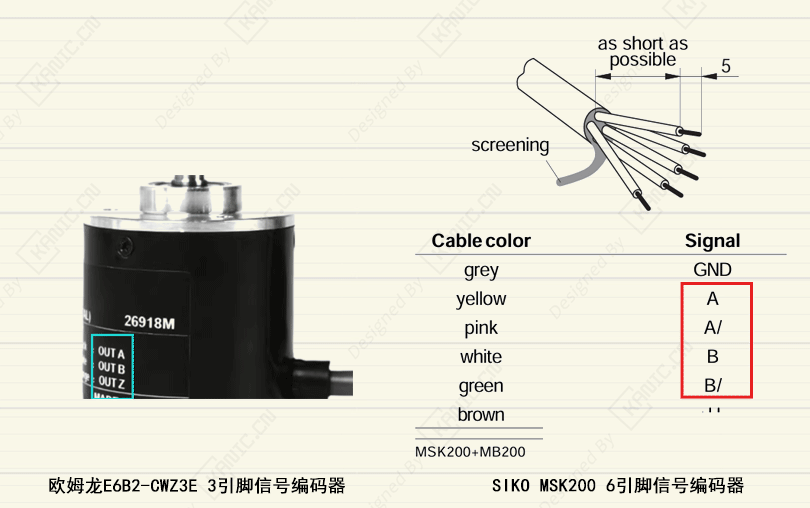
- 只有 A / B / Z 的单端编码器
- 还是带 A、/A、B、/B、Z、/Z 的差分编码器
方向判断的根本,始终是 A、B 相位关系。
一旦安装方向、机械结构或接线方式发生变化,编码器的“正方向”就可能和系统期望的方向不一致。
背景
1️⃣ 编码器机械安装方向相反
- 正常:顺时针 → A 超前 B
- 实际装反:顺时针 → B 超前 A
2️⃣ A / B 接线对调
- 插头方向一反
- A、B 不小心插反
3️⃣ 左右对称机构
- 左电机、右电机机械结构镜像
- 同样转动,编码器相位逻辑刚好相反
4️⃣ 控制算法的“正方向定义”固定
- 例如:
- 速度正 = 伸出
- 但硬件实际给的是负方向
常见的处理方式
最直观的做法,是在程序里把信号取反:
- 位置乘个
-1 - 速度再乘个
-1
短期能用,但模型一多、实验一换,方向问题就开始变得混乱。
更省事的做法
方向问题放在信号最前端处理会更干净:
- 在板卡或 I/O 层设置编码器计数方向
- 在 Simulink 的编码器模块中直接反转方向
这样一来,进入控制模型的信号,物理意义就是统一的。
为什么值得这么做?
方向一旦统一:
- 程序不用反复改正负号
- 不同实验之间更容易复用模型
- 后续调试也更直观
一句话总结
编码器方向不是控制算法问题,而是接口和定义问题。 在源头处理,后面会轻松很多。
说明
>本文相关代码与实验案例已整理至 GitHub(KANIC-lab/KANIC),主要用于自动化控制实验、半实物仿真及控制算法验证。
★ 适用场景:
- 自动化控制课程实验搭建
- 研究生论文实验验证
- 控制系统与硬件联调测试
◆ 如需获取以下内容:
- 实验系统配置方案
- 设备租赁与替代方案
- 控制实验快速搭建路径
请通过 GitHub 或文章编号(如 EXP-XXXX-XXX)联系,并说明具体实验需求。